코너에서 핸들을 놓았는데 차가 도로를 따라갔다 - 자동 추종을 걷어낸 기록
Apex Seoul의 무입력 차량이 코너를 따라가던 원인을 road-relative 좌표와 passive yaw에서 찾고, world heading 기반 횡이동, 조향 sprite 분리, 가드레일 contact lifecycle과 코너 출구 회전 제한으로 조향이 필요한 코너를 다시 만들었습니다.
지난 글에서는 Apex Seoul의 차량 스프라이트를 게임 안에 붙여보았다.
Genesis G70 128px approved sprite를 런타임 차량으로 연결했고, 기본 grip steering은 5way가 아니라 3way로 두었다. 고저차에서 차가 떠 보이는 문제를 contact cue와 그림자로 다시 잡았고, 둥근 타원 그림자 대신 silhouette shadow pass도 넣었다.
그때의 결론은 이랬다.
차량은 이미지 파일로 완성되는 것이 아니라, 도로 위에서 붙어 보일 때 완성된다.
이번에는 그 다음 문제를 봤다.
차량은 이제 어느 정도 붙어 보인다.
그런데 달려보면 아직 이상하다.
정지 상태에서 가속하는 느낌이 어색하고, 속도 수치와 체감이 맞지 않고, 고속에서 차체가 너무 크게 틀어져 보이기도 했다.
이번 글에서는 그 감각을 한 번에 고치지 않고, 작은 지표로 쪼개서 반복 비교할 수 있게 만든 과정을 정리한다.
현재 데모는 아래에서 볼 수 있다.
이번 구현 결과는 이런 모습이다.
핸들링을 고치기 전에 main.ts부터 쪼갰다.
처음에는 게임이 작으니 한 파일에 있어도 괜찮았다.
하지만 핸들링을 보기 시작하니 문제가 생겼다.
속도, 조향, HUD, runtime query, telemetry, road object, shader가 한 파일에 있으면 어떤 값이 감각을 바꾸는지 따라가기 어렵다.
그래서 현재는 대략 이렇게 나누었다.
game/runtimeConfig.ts
game/runtimeTelemetry.ts
game/playerVehicleController.ts
game/hud.ts
game/roadObjectRenderer.ts
game/speedEffectShader.ts특히 중요한 것은 playerVehicleController.ts다.
자동 테스트에서 Phaser scene 전체를 띄우지 않고도 차량 속도와 조향만 돌려보고 싶었기 때문이다.
그래서 차량 컨트롤러는 가능하면 Phaser에 기대지 않게 만들었다.
export type PlayerVehicleControllerConfig = {
accelSpeed: number;
engineAcceleration: number;
highSpeedSteerForceDrop: number;
highSpeedSteerVisualDrop: number;
curveDriftAcceleration: number;
curveSteeringCue: number;
};이렇게 나누고 나니 이후 작업이 훨씬 편해졌다.
게임 화면에서 보는 값과, 브라우저 없이 빠르게 비교하는 값이 같은 설정을 바라볼 수 있게 되었기 때문이다.
그 다음은 화면 비율이었다.
이전에는 화면 크기에 따라 감각이 조금씩 달라졌다.
일반 UI라면 반응형이 좋은 방향일 수 있다. 하지만 pseudo 3D 레이싱에서는 horizon, 차량 anchor, road width, FOV의 관계가 곧 조작 감각이 된다.
같은 속도와 같은 커브라도 화면 비율이 바뀌면 도로가 더 길어 보이거나, 차량이 더 답답해 보이거나, 조향이 더 큰 것처럼 느껴질 수 있다.
그래서 논리 화면을 고정했다.
logical size: 1200 x 760
Phaser scale mode: FIT브라우저 크기는 바뀔 수 있지만, 게임 안에서 보는 기준 화면은 항상 같은 비율을 유지한다.
이 작업은 화려하지 않지만 중요했다.
핸들링 튜닝을 할 때 기준 화면이 흔들리면, 내가 고친 것이 물리인지 화면 비율인지 알 수 없기 때문이다.
지난 글에서는 Canvas 단계에서도 silhouette shadow를 붙였다.
이번에는 renderer를 WebGL로 바꾸고, 속도감 연출도 다시 보았다.
처음에는 속도가 올라갈 때 카메라를 확대하는 연출을 생각했다.
하지만 실제로는 별로 좋은 방향이 아니라고 판단했다.
고속에서 차량을 크게 확대하면 도로를 읽을 공간이 줄어든다. 조작 기준점도 무거워지고, pseudo 3D 도로의 원근감이 답답해질 수 있다.
그래서 확대가 아니라 반대에 가까운 방향으로 갔다.
고속에서 FOV를 조금 넓히고, 도로 하단과 shoulder 쪽에 얇은 speed streak를 더했다.
현재 값은 이렇다.
camera FOV speed bonus: 3.5
speed effect min ratio: 0.42
speed effect max alpha: 0.88
speed effect time scale: 1.7이 speed cue는 Phaser.GameObjects.Shader로 만들었다.
전체 화면 blur는 쓰지 않았다. HUD와 차량을 덮지 않도록 player shadow보다 낮은 depth에 두고, 도로 흐름을 보조하는 정도로만 넣었다.
속도감은 한 가지 효과로 만들기 어렵다.
도로 segment의 흐름, roadside object, FOV, horizon, shader cue가 같이 만들어야 한다.
이번 작업은 그중에서 FOV와 shader 쪽을 조금 열어둔 단계다.
작업 중에 헷갈렸던 부분이 하나 있었다.
HUD에 보이는 speed가 700 근처까지 올라간다.
처음 보면 700km/h처럼 느껴질 수 있다.
하지만 Apex Seoul의 내부 speed는 실제 km/h가 아니다. 도로 z를 얼마나 빨리 진행시키는지를 나타내는 world unit/sec에 가깝다.
그래서 표시용 속도와 내부 속도를 분리했다.
현재 표시 기준은 이렇게 잡았다.
760u = 200 km/h
700u = 184 km/h
440u = 116 km/h즉 speed 700대는 현실 속도 700km/h가 아니라, 표시 기준으로는 약 180km/h대다.
다운힐 공도 감각이라면 200km/h를 크게 넘는 표시는 어색하다. 대신 실제 속도감은 도로 흐름과 화면 cue로 만든다.
HUD에는 둘을 같이 보이게 했다.
speed 184 km/h (700u)이렇게 해두면 디버깅할 때는 내부 단위를 볼 수 있고, 플레이어에게 보여줄 감각은 km/h 기준으로 조정할 수 있다.
정지 상태에서 가속할 때도 이상함이 있었다.
엔진 가속을 높이면 고속 추진감은 좋아진다.
그런데 그 값을 그대로 정지 출발에 쓰면 출발 순간이 너무 튄다.
반대로 엔진 가속을 낮추면 출발은 부드럽지만, 고속으로 올라가는 과정이 답답해진다.
그래서 저속 구간에 별도 throttle ratio를 넣었다.
engineAcceleration: 170
launchThrottleMinRatio: 0.30
launchThrottleFullSpeedRatio: 0.38정지 근처에서는 엔진 힘을 30% 정도로 시작하고, speed ratio가 0.38 근처에 갈수록 full throttle에 가까워진다.
시뮬레이션 기준으로 0-100km/h 표시 속도는 약 5초 근처가 되었다.
정확한 차량 시뮬레이션을 만들려는 것은 아니다.
목표는 정지 출발에서 “차가 순간이동하듯 튄다”와 “차가 깨어나지 않는다” 사이를 찾는 것이다.
핸들링을 바로 수정하기 전에 먼저 문서로 비교 기준을 잡았다.
문서 이름은 docs/apex-seoul-handling-outrun-review.md다.
여기서 중요한 점은 OutRun을 복제하겠다는 뜻이 아니라는 것이다.
원본 sprite나 물리값을 가져오려는 것이 아니다.
참고한 것은 감각의 구조다.
내가 잡은 기준은 이렇다.
1. 화면 하단 차량은 안정적인 기준점이어야 한다.
2. grip 조향은 빠르지만 과장되지 않아야 한다.
3. 도로 커브가 차를 밀어야 하지만 조작권을 빼앗으면 안 된다.
4. 코너 감속은 벌점처럼 느껴지면 안 된다.
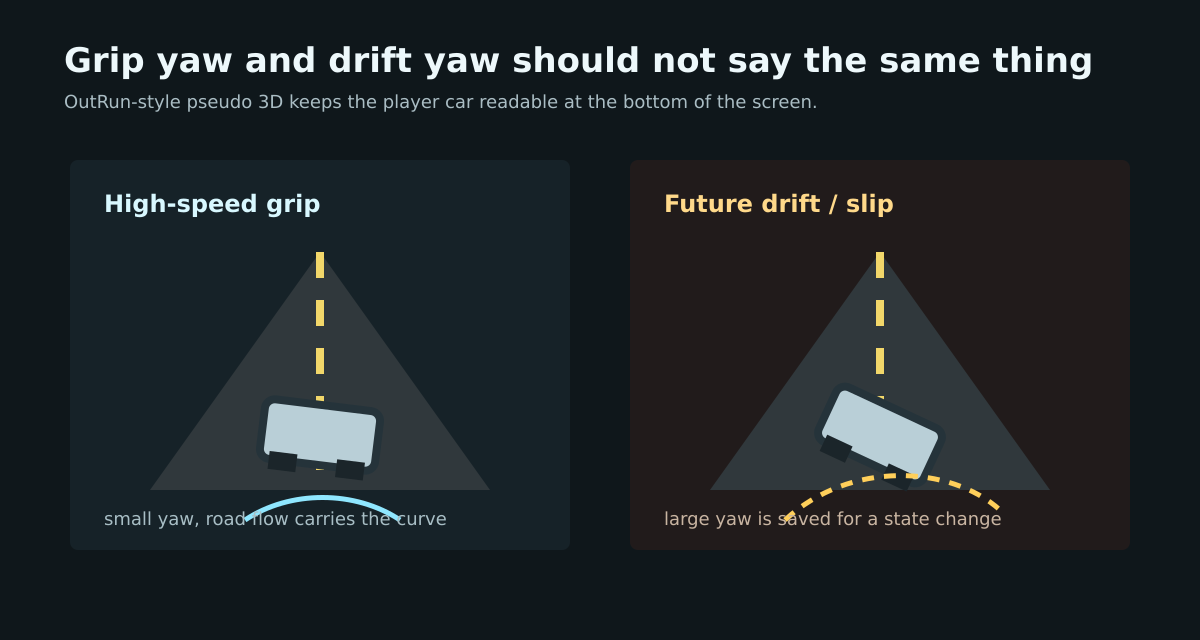
5. 속도감은 수치보다 도로 흐름과 FOV가 먼저다.특히 grip과 drift의 역할 분리가 중요했다.
기본 grip 상태에서 차체 yaw가 너무 크면, 플레이어는 “잘 돌고 있다”보다 “이미 미끄러지고 있다”로 읽을 수 있다.
그래서 기본 주행에서는 작은 yaw만 쓰고, steer-left-2, steer-right-2처럼 큰 yaw pose는 나중에 drift/slip 상태를 만들 때 열기로 했다.
문서를 만들고 나니 다음 문제가 생겼다.
이 기준을 매번 사람이 직접 플레이하면서 비교하기에는 시간이 너무 많이 든다.
그래서 브라우저 없이 빠르게 도는 simulation runner를 만들었다.
npm run qa:handling-sim --workspace @games/apex-seoul이 스크립트는 Phaser scene 전체를 띄우지 않는다.
playerVehicleController만 직접 돌리면서 후보 설정을 비교한다.
렌더링, road object, shader, 실제 sprite frame은 볼 수 없다. 대신 속도, lateral offset, steering, curve force 같은 값은 아주 빠르게 비교할 수 있다.
시나리오는 이렇게 나누었다.
standing-start-12s
straight-accel-20s
micro-tap-left
hold-left-1s-release
left-hold-3s-release
slalom-20s
curve-no-input
curve-counter-steer각 시나리오는 사람이 느끼는 애매함을 작게 쪼갠 것이다.
예를 들어 micro-tap-left는 아주 짧게 왼쪽을 눌렀을 때 차가 얼마나 움직이는지 본다.
짧게 톡 눌렀는데 차가 너무 많이 움직이면 불안하다.
반대로 전혀 반응하지 않으면 둔하다.
curve-counter-steer는 커브가 차를 밀 때 반대 조향으로 회복 가능한지를 본다.
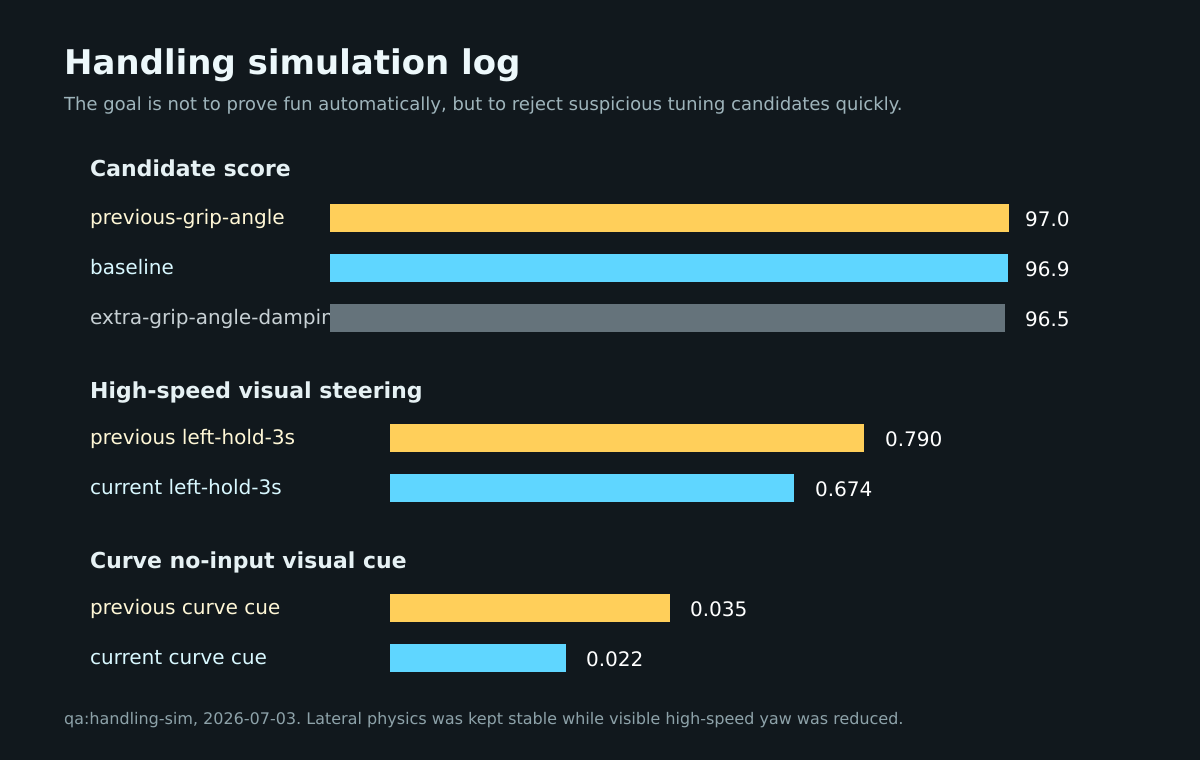
점수는 절대적인 재미 점수가 아니다.
자동화로 좋은 핸들링을 증명할 수는 없다.
다만 이상한 후보를 빠르게 탈락시키고, 사람이 실제 화면으로 볼 후보를 줄일 수는 있다.
처음에는 커브가 차를 너무 강하게 빼앗는 느낌과, 코너에서 속도가 벌점처럼 죽는 느낌을 줄였다.
대략 이런 값들이 바뀌었다.
curveDriftAcceleration: 260 -> 160
curveSteeringCue: 0.10 -> 0.06
cornerAccelSpeedDrop: 150 -> 100
cornerSpeedPull: 190 -> 120
engineAcceleration: 128 -> 170
steeringVelocityCue: 0.38 -> 0.25
highSpeedSteerVisualDrop: 0.34 -> 0.25
steerWeak: 0.18 -> 0.16이 단계의 목적은 차를 더 빠르게 만드는 것이 아니었다.
도로가 커브를 전달하되, 운전자가 조작권을 빼앗긴 것처럼 느끼지 않게 하는 것이었다.
그리고 throttle을 누르고 있는데 코너에서 갑자기 엔진이 꺼진 것처럼 느껴지는 것도 줄이고 싶었다.
그 다음에는 조향 감각을 봤다.
시각 pose는 빨리 읽혀야 한다.
하지만 실제 lateral movement가 너무 쉽게 커지면 차가 차선을 먹고 들어가는 것처럼 불안해진다.
그래서 두 가지를 같이 보았다.
inputResponse: 16 -> 18
steeringVelocityCue: 0.25 -> 0.20
steerWeak: 0.16 -> 0.14
steerAcceleration: 1750 -> 1650
centeringResponse: 1.9 -> 1.75inputResponse와 steerWeak는 pose가 더 빨리 읽히도록 한다.
반대로 steeringVelocityCue는 줄였다.
입력 해제 후 lateral velocity 때문에 차체가 오래 비틀려 보이는 것을 줄이기 위해서다.
steerAcceleration과 centeringResponse는 actual lateral movement의 무게를 조금 조정했다.
결과적으로 짧은 탭이나 슬라럼에서 lateral offset이 조금 더 예측 가능해졌다.
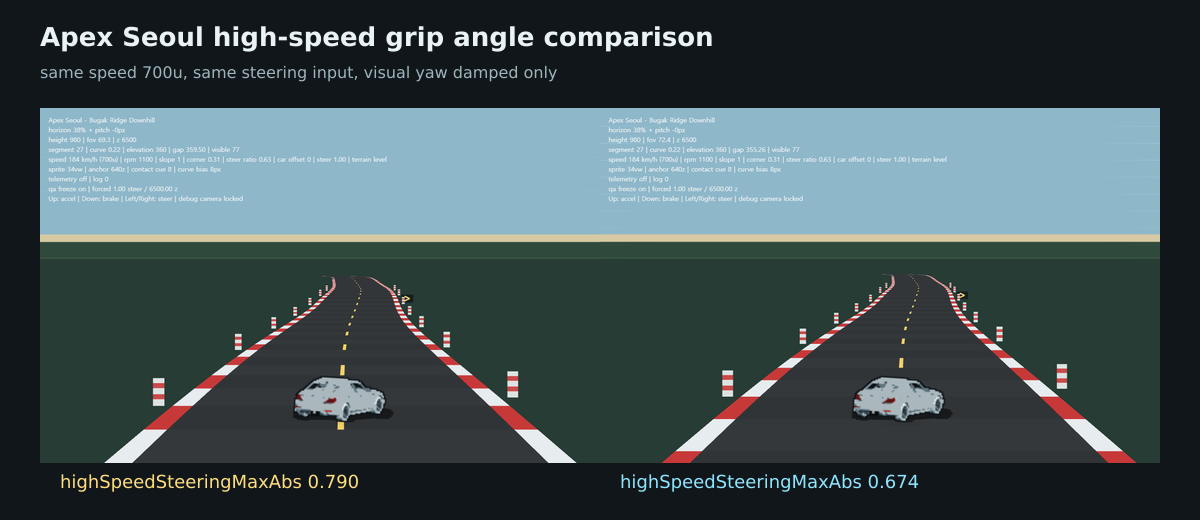
마지막으로 본 것은 고속 grip 각도였다.
여기서 문제가 꽤 분명했다.
고속에서는 실제 조향 힘이 줄어든다.
하지만 visual pose는 그만큼 줄지 않았다.
기존 구조는 대략 이랬다.
steerForceRatio = highSpeedSteerForceDrop 0.42
steerVisualRatio = highSpeedSteerVisualDrop 0.25
curve visual cue = currentCurve * speedRatio * curveSteeringCue최고속 근처에서 실제 조향 힘은 약 58%까지 줄어든다.
하지만 visual pose는 약 75%까지밖에 줄지 않았다.
게다가 커브 visual cue는 speedRatio에 비례해서 커졌다.
즉 차는 고속이라 덜 돌아야 하는데, 화면에서는 아직 꽤 크게 틀어져 보일 수 있었다.
OutRun식 grip 감각으로 보면 이건 좋지 않다.
기본 grip 상태의 차체 yaw가 커지면, 커브를 도는 것이 아니라 drift 중인 것처럼 읽힌다.
그래서 고속 grip에서는 보이는 각도만 더 눌렀다.
highSpeedSteerVisualDrop: 0.25 -> 0.38
curveSteeringHighSpeedDrop: 0.00 -> 0.38
curveSteeringCue: 0.06 유지중요한 점은 lateral physics를 크게 바꾸지 않았다는 것이다.
차가 실제로 움직이는 양을 먼저 바꾸면 조작감이 또 달라진다.
이번에는 “보이는 고속 yaw”만 줄여서, grip과 drift의 시각 역할을 분리했다.
시뮬레이션 로그는 이렇게 나왔다.
previous-grip-angle score: 97.0
baseline score: 96.9
extra-grip-angle-damping score: 96.5
left-hold-3s highSpeedSteeringMaxAbs:
0.790 -> 0.674
curve-no-input highSpeedCurveSteeringMaxAbs:
0.035 -> 0.0220.45까지 더 강하게 누르는 후보도 있었다.
하지만 그 후보는 pose가 너무 죽을 수 있어 보류했다.
현재는 0.38이 적당한 1차 지점으로 보인다.
이번 작업에서 자동 시뮬레이션은 꽤 도움이 되었다.
하지만 이것이 핸들링을 완성했다는 뜻은 아니다.
자동 simulation이 보는 것은 이런 값이다.
speed
lateralOffset
steering
curve force
candidate score반대로 아직 못 보는 것도 많다.
road object flow
shader speed cue의 실제 화면 느낌
sprite frame의 시각적 무게
shadow와 pose가 같이 읽히는지
손으로 조작할 때의 심리적 반응게임 감각은 결국 사람이 봐야 한다.
다만 사람이 매번 같은 후보를 직접 달려보는 것은 비싸다.
자동화는 감각을 대체하는 것이 아니라, 감각을 확인할 후보를 줄이는 도구다.
이번 작업에서 가장 큰 수확도 그것이었다.
“뭔가 이상하다”를 다시 같은 조건으로 불러올 수 있게 되었다.
차량이 도로에 붙어 보이는 것과, 달릴 때 믿을 수 있는 것은 다른 문제였다.
지난 글에서는 sprite, 고저차, shadow를 한 화면의 물리처럼 맞추는 데 집중했다.
이번에는 그 다음 단계로 속도, 조향, 커브 감각을 OutRun식 grip 기준으로 다시 쪼갰다.
내부 speed unit과 표시 km/h를 분리했고, 정지 출발 throttle을 보정했고, WebGL shader로 속도 cue를 조금 더했다.
그리고 무엇보다 자동 handling simulation을 만들어 튜닝 후보를 반복 비교할 수 있게 했다.
아직 최종 핸들링은 아니다.
다음에는 curveDriftAcceleration: 160 -> 130 후보를 실제 브라우저 화면에서 다시 보고 싶다. road object flow와 shader speed cue도 더 다듬어야 한다.
언젠가는 drift/slip 상태를 만들고, 지금 아껴둔 강한 yaw pose도 다시 열어야 한다.
하지만 이제 방향은 조금 더 분명하다.
좋은 주행 감각은 한 번에 맞추는 것이 아니라, 이상한 느낌을 다시 불러와 비교할 수 있을 때 가까워진다.
Apex Seoul의 무입력 차량이 코너를 따라가던 원인을 road-relative 좌표와 passive yaw에서 찾고, world heading 기반 횡이동, 조향 sprite 분리, 가드레일 contact lifecycle과 코너 출구 회전 제한으로 조향이 필요한 코너를 다시 만들었습니다.

최고속과 가드레일을 맞춘 뒤에도 코너는 느리고 차체는 과하게 꺾여 보였습니다. grip과 drift의 sprite 역할을 분리하고, 코너 리듬과 near-field 표식을 고친 뒤, 다른 pseudo 3D 레이싱 게임과 화면 흐름을 비교해 physical speed와 world progression 사이에 longitudinal scale을 도입한 과정을 정리합니다.

최고속을 고치자 가드레일 충돌이 드러나고, 충돌을 고치자 차량이 화면 밖으로 밀렸습니다. Apex Seoul의 자동 주행 QA에서 이어진 실패와 수정 과정을 정리합니다.

Apex Seoul의 밤 다운힐 비주얼을 왼쪽 절벽·가드레일, 오른쪽 옹벽·수목 구조로 재정리하고, 가드레일 충돌, 저속 조향 pose, standing start 파워밴드까지 주행 로그와 자동 QA로 다시 맞췄습니다.

Apex Seoul에서 200km/h grip 주행이 너무 쉽게 느껴진 이유를 주행 로그로 분해하고, 코스 곡률을 바꾸지 않은 채 하향 코너 속도 예산·understeer·안전 여유 비용·자동 검증으로 다운힐의 선택을 만들었습니다.

Apex Seoul에 스페이스 브레이크 기반 드리프트와 카운터 스티어를 넣고, 입력을 놓았을 때의 복귀·전환을 별도 상태로 분리했습니다. 주행 로그와 자동 시나리오로 감각을 수치화하며, 스핀은 아직 구현하지 않기로 한 이유도 정리합니다.